本文选自算法导论某一章节,并用高等数学知识对其进行总结
线段
探讨的问题:
- 对于给定的两个有向线段 p0p1 和 p0p2 ,相对于他们的公共端点 p0 来说,P0p1 是否在 p0p2 的顺时针方向?
- 对于给定的两个线段 p0p1 和 p0p2 ,如果先沿着 p0p1 再沿着 p0p2 前进,那么在点 p1 处是否要向左转?
- 线段 p0p1 和 p0p2 是否相交?
向量积
向量积是计算线段的核心方法。若仅考虑二维平面 (xOy),对于给定的向量 p1=(x1,y1,0) 和 p2=(x2,y2,0) ,则:
p1×p2=⎣⎡ix1x2jy1y2k00⎦⎤=[x1x2y1y2]⋅k=(x1y2−x2y1)⋅k
若将向量看作大小运算,则:
p1×p2=x1y2−x2y1=−p2×p1
- 若 p1×p2 为正,则相对于 原点(0,0) 来说, p1 位于 p2 的顺时针方向;
- 若 p1×p2 为负,则相对于 原点(0,0) 来说, p1 位于 p2 的逆时针方向;
- 若 p1×p2 为零,则表示出现边界情况,此时两个向量是共线的
为了确定相对于公共端点 p0 ,有向线段 p0p1 是在顺时针还是逆时针方向更靠近 p0p1,可以将 p0 作为原点简化问题:用 p1−p0 表示向量 p1′=(x1−x0,y1−y0) 和 p2′=(x2−x0,y2−y0),计算叉积:
(p1−p0)×(p2−p0)=(x1−x0)(y2−y0)−(x2−x0)(y1−y0)
如果叉积为正,那么 p0p1 位于 p0p2 的顺时针方向;反之亦然。
确定连续线段是向左转还是向右转
利用叉积可以避免计算角度问题。方法如下:对于两条连续线段 p0p1 和 p0p2 ,计算叉积 (p2−p0)×(p1−p0) ,若结果为正,则 p0p2 在 p0p1 的顺时针方向,即在 p1 处右转;反之亦然;若叉积为0,意味着 p0,p1,p2 三者共线。
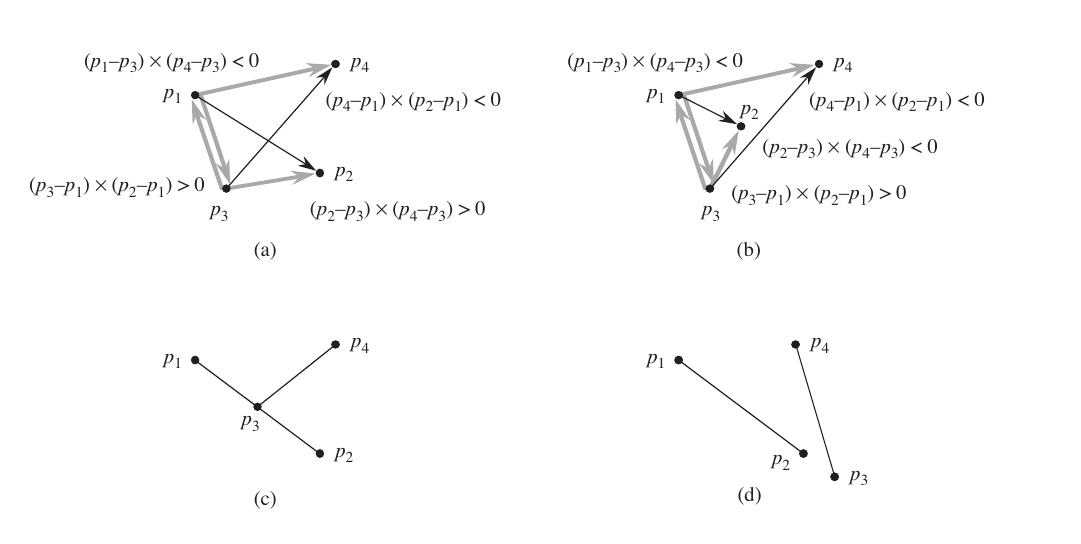
判定两条线段是否相交
需要检查每条线段是否跨越了包含另一条线段是直线。
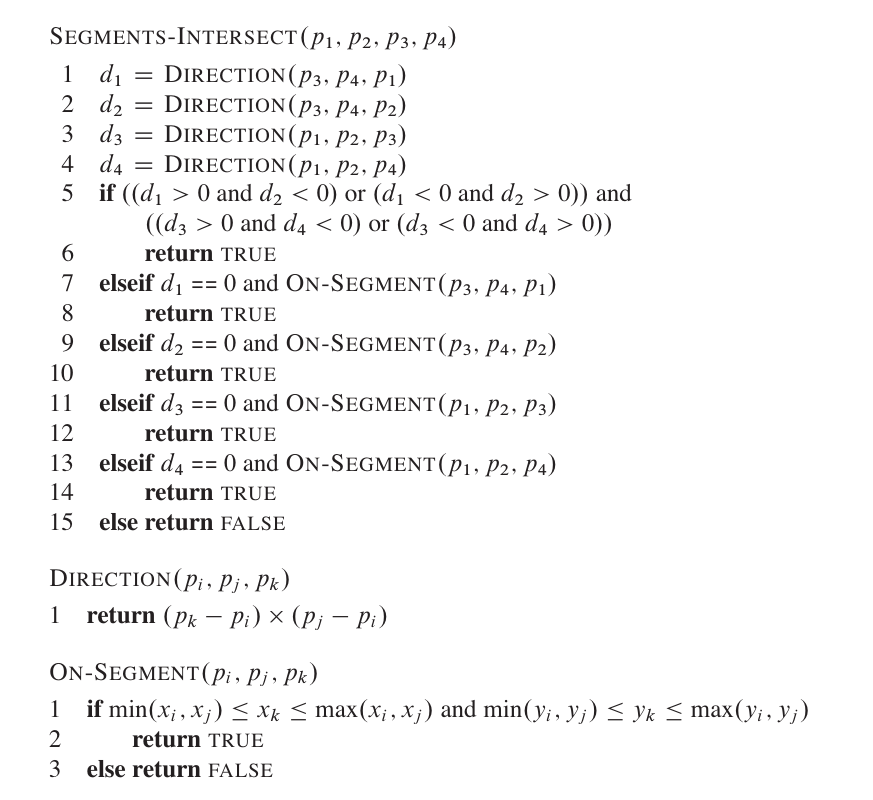
伪代码如下
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
| #include<stdio.h>
#include<stdlib.h>
struct point{
int x;
int y;
point(){}
point(int _x,int _y):x(_x),y(_y){}
};
int direction(point p0,point p1,point p2){
return (p1.x-p0.x)*(p2.y-p0.y)-(p2.x-p0.x)*(p1.y-p0.y);
}
int min(int a,int b){ return a<b?a:b; }
int max(int a,int b){ return a>b?a:b; }
bool on_segment(point p0,point p1,point p2){
if((min(p0.x,p1.x)<=p2.x<=max(p0.x,p1.x))
&&(min(p0.y,p1.y)<=p2.y<=max(p0.y,p1.y))) return true;
return false;
}
bool segment_intersect(point p1,point p2,point p3,point p4){
int d1=direction(p1,p2,p4);
int d2=direction(p1,p2,p3);
int d3=direction(p3,p4,p1);
int d4=direction(p3,p4,p2);
printf("d1:%d\td2:%d\td3:%d\td4:%d\n",d1,d2,d3,d4);
if(((d1<0&&d2>0)||(d1>0&&d2<0)) && ((d3<0&&d4>0)||(d3>0&&d4<0))) return true;
else if(d1==0&&on_segment(p1,p2,p4))return true;
else if(d2==0&&on_segment(p1,p2,p3))return true;
else if(d3==0&&on_segment(p3,p4,p1))return true;
else if(d4==0&&on_segment(p3,p4,p2))return true;
return false;
}
int main(){
point p1(1,1),p2(4,4);
point p3(3,3),p4(4,0);
if(segment_intersect(p1,p2,p3,p4))
printf("线段相交...\n");
return 0;
}
|